Abstract: A recent rise in the number of small spacecraft has motivated the development of the DEFIANT microsatellite platform at the Space Flight Laboratory. This thesis details the development of multiple spacecraft subsystems for the DEFIANT platform, including the guidance, navigation and control, propulsion and deployable solar panel subsystems. The testing process for spacecraft hardware is presented and used in the qualification and acceptance of several subsystems for the DEFIANT platform. Finally, developments in the on-orbit operation of the guidance, navigation and control subsystem are detailed and used in the commissioning of several spacecraft. The work outlined in this thesis was used in the design, analysis, testing, and commissioning of over 20 spacecraft for the Space Flight Laboratory, supporting its competitive advantage in the microsatellite world market.
NOTE: For optimal viewing of the diagrams below, please switch to the website’s light theme by clicking the moon icon at the top right, if you’re currently using the dark theme.
Azimuth-elevation plot of the Sun and nadir vectors mapped to the spacecraft body frame for a STR elevation of -30$^{\circ}$ and the final optimized trajectory, in a 6:00 LTAN orbit, for mission 2
Angle from the STR boresight to the Sun and nadir vector, respectively, for the final STR placement of -30 deg elevation and final optimized trajectory, in a 6:00 LTAN orbit, for mission 2
Cost function values as a function of STR elevation $\phi$, and anti-nadir scaling factor $c_\mathrm{n}$, across the bounded optimization domain for the optimization problem from equation 3.82 for the first implementation stage of mission 1, assuming a small baffle
Cost function values as a function of STR elevation $\phi$, and anti-nadir scaling factor $c_\mathrm{n}$, across the optimization domain for the optimization problem from equation 3.82 for the first implementation stage of mission 2, assuming a small baffle
Target tracking trajectory for a time-invariant target on Earth’s surface
Principal angle and rate control error during sample period of coarse target tracking operations
Principal angle and rate control error during sample period of fine target tracking operations, using orbit normal constraint
Principal angle and rate control error during sample period of fine target tracking operations, using orbit normal constraint
Thermal test temperature profile for acceptance test of a GNC sensor
Temperature data for the gradient test of the deployable solar panel system in thermal chamber
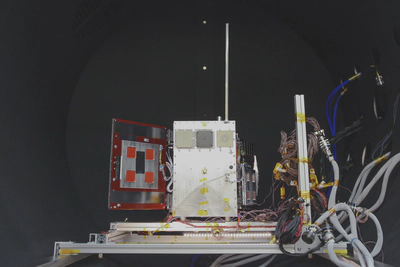
Deployable solar panel system TVAC test setup: T-slot test stand with a spacecraft bus mounted to it, supporting two panels
Magnetometer on-orbit measurement residuals, before and after on-orbit calibration
Reaction wheel speeds resulting from the numerical optimization methodology used to determine the inertial momentum setpoint at one-month intervals
Reaction wheel and spacecraft angular velocity during inertia estimation maneuver
Exposure time of 0.05 s, non-dimensional value of pixel brightness threshold of 70
Exposure time of 0.1 s, non-dimensional value of pixel brightness threshold of 110
Cumulative distribution function of fine Sun sensor and magnetometer on-orbit measurement error
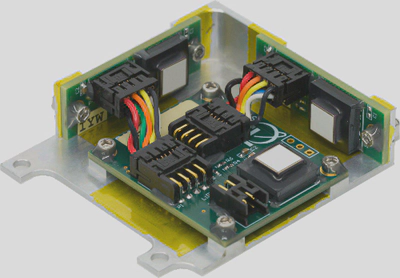
 Photo by Emerson Vargas Niño
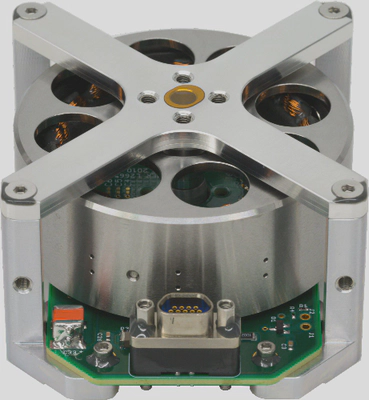
Photo by Emerson Vargas Niño